Humanoid Robot Configuration: Generative Design and Optimization Using AI (Principal Investigator, 11/2025 to 11/2027)

AI for Science and Engineering (Key Program): Midea Corporate Research Center/State Key Laboratory of High-end Heavy-duty Robotics (Blue-Orange Lab)/Guangdong Key Laboratory of Fundamental Technology for Home Appliances.
Selected publications:
- Coming Soon.
- Coming Soon.
Design and Application of Bipedal Wheeled Intelligent Robots (Principal Investigator, 04/2025 to 10/2025)

Industrial collaboration project: XX Group Co., Ltd. Preliminary research project
Selected publications:
- Coming Soon.The wheeled intelligent robot Guanghua-X is being developed.
- Coming Soon.The wheeled intelligent robot Guanghua-X is being developed.
Guanghua-0 - Fudan University's First Prototype General-Purpose Humanoid Robot (Technical Lead, 12/2023 to 04/2024)

Shanghai Municipal Science and Technology Major Project on Frontier Basic Theories and Key Technologies of Artificial Intelligence
Selected publications:
Guanghua-1 - Fudan University's First Commercial General-Purpose Humanoid Robot (Technical Lead, 04/2024 to 12/2024)

Shanghai Municipal Science and Technology Major Project on Frontier Basic Theories and Key Technologies of Artificial Intelligence
Selected publications:
Optimization and Debugging of Self - Balancing Exoskeleton Robots (Principal Investigator, 10/2024 to 02/2025)

Industrial collaboration project: XX Group Co., Ltd. Preliminary research project
Selected publications:
- News Report: "精工科技AI外骨骼机器人来了!"
- [Link]
- Tian, C. , Zhang, D. , Tang, H. , & Liu, J. . (2021). Reconfigurable generalized parallel mechanisms with kinematotropic linkages. 2021 7th International Conference on Mechatronics and Robotics Engineering.
- Tian, C. , & Zhang, D. . (2021). Design and analysis of novel kinematically redundant reconfigurable generalized parallel manipulators. Mechanism and Machine Theory.
Study on Structural Synthesis and Performance Evaluation of Two-Layer and Multi-Loop Generalized Parallel Aerial Manipulator(Principal Investigator, 01/2024 to 12/2026)

National Natural Science Foundation of China (NSFC) Project
Selected publications:
- Xing, Y. , Tian, C. , Xia, Z. , Gu, J. , & Zhang, D. . (2025). The novel synthesis of generalized parallel manipulators with 8r kirigami-inspired configurable platform. Mechanism and Machine Theory
- Liu, J. , Zhang, D. , Tian, C. , Ma, W. , & Xia, Z. . (2024). A virtual parallel model for the buffer landing of multi-legged landing gear. Mechanism and Machine Theory (2024)
- Li, L. , Zhang, D. , & Tian, C. . (2024). A family of generalized single-loop rcm parallel mechanisms: structure synthesis, kinematic model, and case study. Mechanism and Machine Theory.
- Tian, C. , Li, L. , Xia, Z. , & Zhang, D. . (2023). A Novel Class of (3+2)-DOF Reconfigurable Generalized Parallel Mechanisms with Kinematic Redundancy. IFToMM World Congress on Mechanism and Machine Science. Springer.
Design and Simulation Testing of the Pillar Buffering and Stabilization Mechanism (Principal Investigator, 09/2023 to 08/2024)

Industrial collaboration project: XX Institute. Preliminary research project
Selected publications:
- The project involves sensitive information and is not suitable for public display.
- The project involves sensitive information and is not suitable for public display.
Research on the Design Theory and Performance Improvement of Non-traditional Parallel Manipulators (Principal Investigator, 04/2019 to 03/2021)
National Natural Science Foundation of China (NSFC) Project
Selected publications:
- Xia, Z. , Zhang, D. , Chen, Y. , Tian, C. , Liu, J. , & Wu, C. . (2022). A novel 6 dofs generalized parallel manipulator design and analysis based on humanoid leg. Mechanism and Machine Theory.
- Tang, H. , Zhang, D. , & Tian, C. . (2022). An approach for modeling and performance analysis of three-leg landing gear mechanisms based on the virtual equivalent parallel mechanism. Mechanism and Machine Theory.
- Tang, H. , Zhang, D. , & Tian, C. . (2022). A method for comprehensive performance optimization of four-leg landing gear based on the virtual equivalent parallel mechanism. Mechanism and Machine Theory.
- Tian, C. , Zhang, D, H. Tang & C. Wu. (2021). Structure synthesis of reconfigurable generalized parallel mechanisms with configurable platforms. Mechanism and Machine Theory.
Research on the Design Theory of Non-traditional Parallel Robots with High Performance Based on Actuation Redundancy (Principal Investigator, 04/2019 to 05/2022)

National Natural Science Foundation of China (NSFC) Project
Selected publications:
- Tian, C. , Zhang, D. , Tang, H. , & Liu, J. . (2021). Reconfigurable generalized parallel mechanisms with kinematotropic linkages. 2021 7th International Conference on Mechatronics and Robotics Engineering.
- Tian, C. , & Zhang, D. . (2021). Design and analysis of novel kinematically redundant reconfigurable generalized parallel manipulators. Mechanism and Machine Theory.
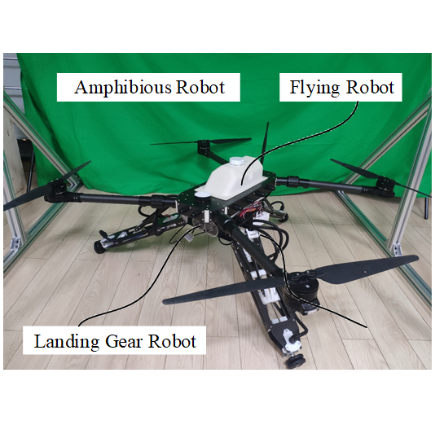
- Tang, H. , Tian, C. , & Zhang, D. . (2021). A novel terrain adaptive landing gear robot. Journal of Physics: Conference Series.
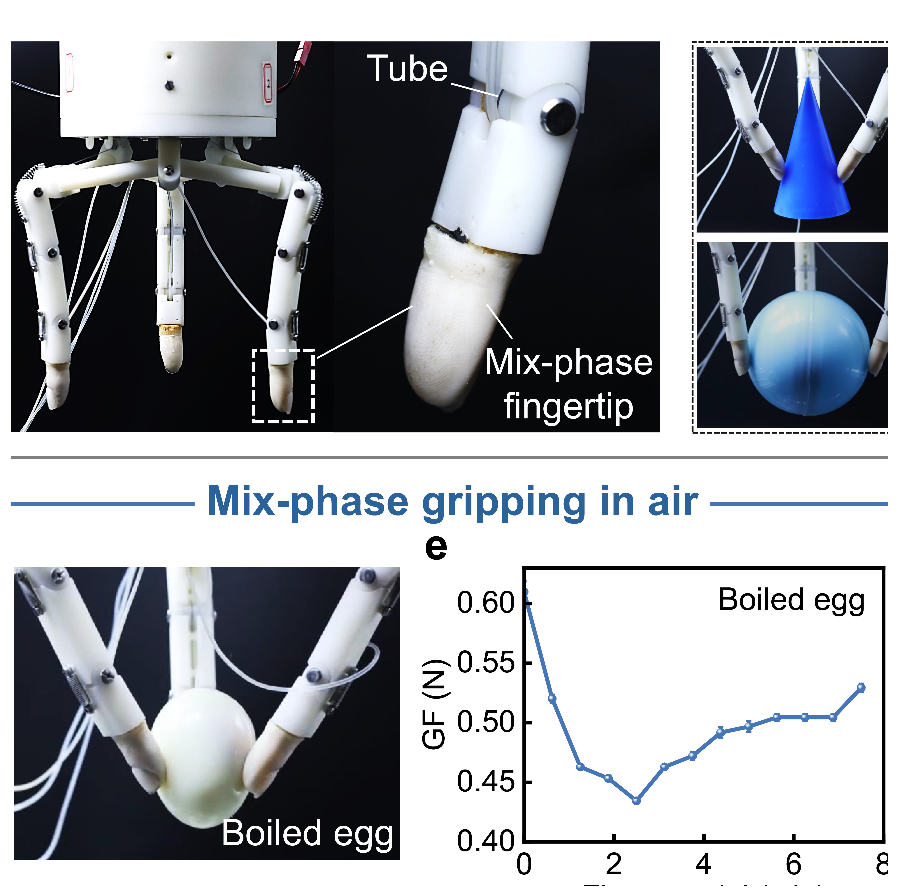
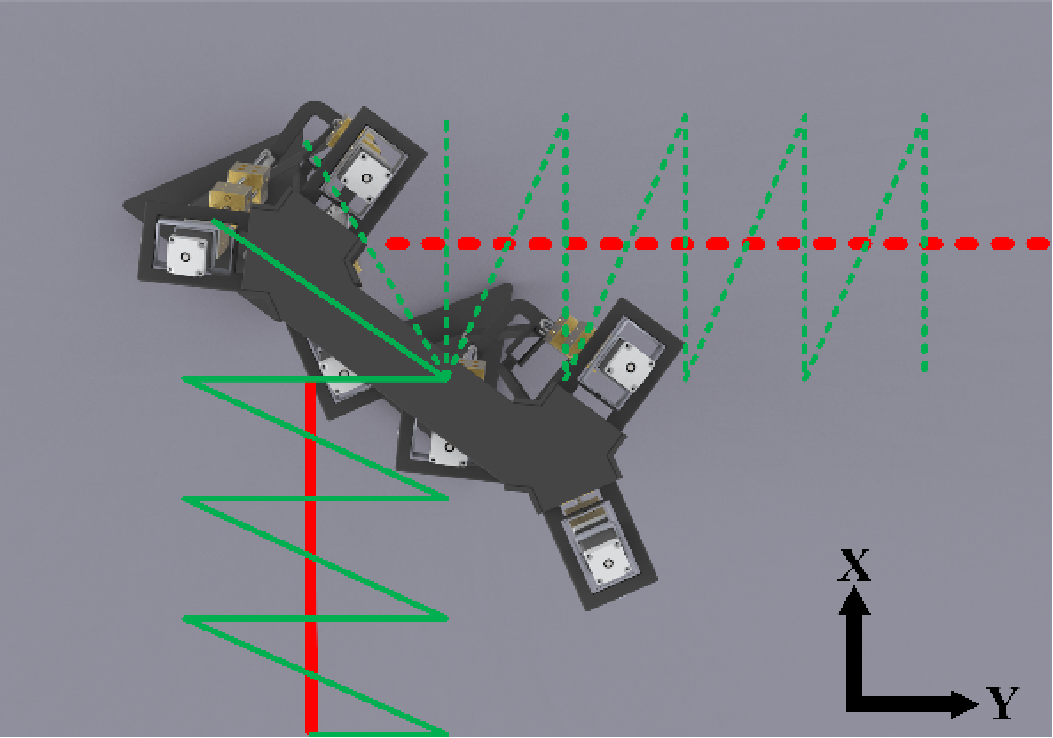
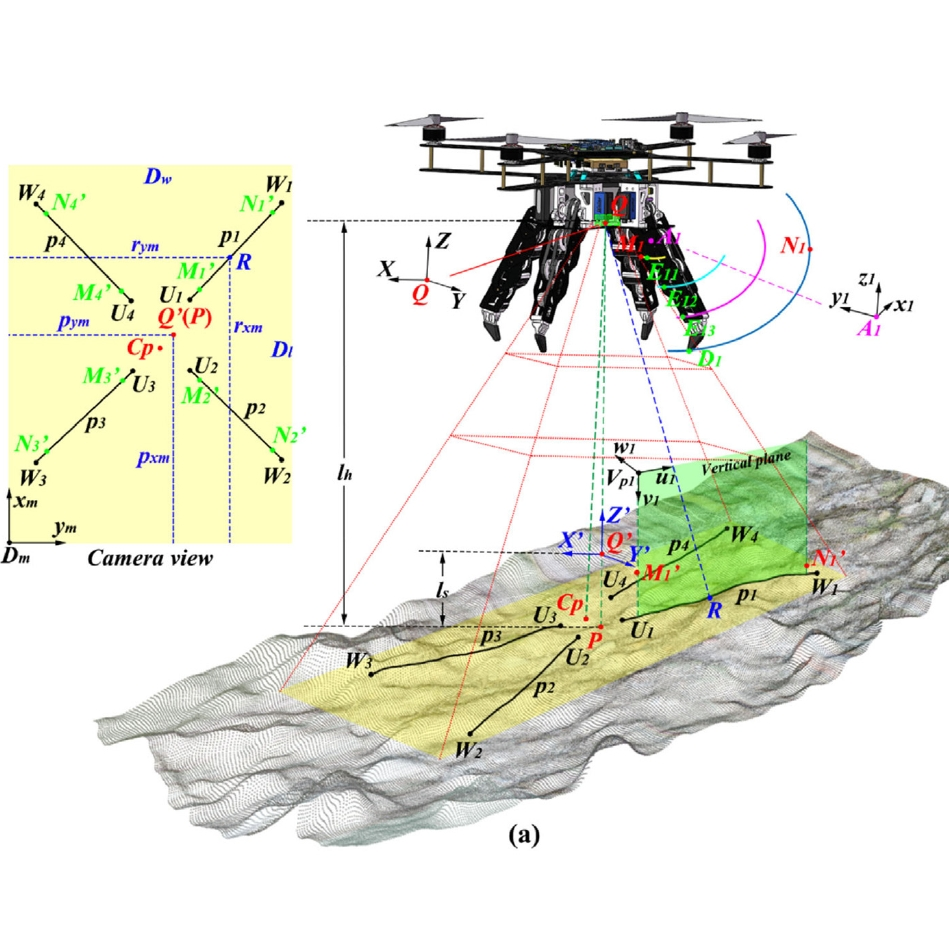
- Liu, J. , Zhang, D. , Wu, C. , Tang, H. , & Tian, C. . (2021). A multi-finger robot system for adaptive landing gear and aerial manipulation. Robotics and Autonomous Systems.
Research on the Design Methods and Motion Characteristics of Spatial Multi-loop Mechanisms (Principal Investigator, 07/2016 to 12/2017)
National Natural Science Foundation of China (NSFC) Project
Selected publications:
- Tian, C. , Zhang, D. , Tang, H. , & Liu, J. . (2021). Reconfigurable generalized parallel mechanisms with kinematotropic linkages. 2021 7th International Conference on Mechatronics and Robotics Engineering.
- Tian, C. , Fang, Y. , & Ge, Q. J. . (2017). Structural synthesis of parallel manipulators with coupling sub-chains. Mechanism and Machine Theory.
- Tian, C. , Fang, Y. , Guo, S. , & Qu, H. . (2016). A class of reconfigurable parallel mechanisms with five-bar metamorphic linkage. Proceedings of the Institution of Mechanical Engineers Part C Journal of Mechanical Engineering.
- Tian, C. , Fang, Y. , & Ge, Q. J. . (2018). New Kinematic Structures for Two-Loop Generalized Parallel Mechanism Designs. 2018 IEEE International Conference on Robotics and Automation (ICRA). IEEE.
Development of High Performance Robotic Systems Through System Decomposition and Hybridization (Participant, Ranked 2nd, 01/2022 to 12/2023)
National Natural Science Foundation of China (NSFC) Project
Selected publications:
- Tian, C. , Li, L. , Xia, Z. , & Zhang, D. . (2023). A Novel Class of (3+2)-DOF Reconfigurable Generalized Parallel Mechanisms with Kinematic Redundancy. IFToMM World Congress on Mechanism and Machine Science. Springer.
- Tang, H. , Zhang, D. , & Tian, C. . (2022). An approach for modeling and performance analysis of three-leg landing gear mechanisms based on the virtual equivalent parallel mechanism. Mechanism and Machine Theory.
- Tang, H. , Zhang, D. , & Tian, C. . (2022). A method for comprehensive performance optimization of four-leg landing gear based on the virtual equivalent parallel mechanism. Mechanism and Machine Theory.
- Tian, C. , Xia, Z. , Li, L. , & Zhang, D. . (2024). The novel synthesis of reconfigurable generalized parallel manipulators with kinematic redundancy. Mechanism and Machine Theory.
Trimodal Robot (Participant, Ranked 2nd, 2020/10 to 2021/09)
National Natural Science Foundation of China (NSFC) Project
Selected publications:
- Tian, C. , Li, L. , Xia, Z. , & Zhang, D. . (2023). A Novel Class of (3+2)-DOF Reconfigurable Generalized Parallel Mechanisms with Kinematic Redundancy. IFToMM World Congress on Mechanism and Machine Science. Springer.
- Tang, H. , Zhang, D. , & Tian, C. . (2022). An approach for modeling and performance analysis of three-leg landing gear mechanisms based on the virtual equivalent parallel mechanism. Mechanism and Machine Theory.
- Tang, H. , Zhang, D. , & Tian, C. . (2022). A method for comprehensive performance optimization of four-leg landing gear based on the virtual equivalent parallel mechanism. Mechanism and Machine Theory.
- Tian, C. , Xia, Z. , Li, L. , & Zhang, D. . (2024). The novel synthesis of reconfigurable generalized parallel manipulators with kinematic redundancy. Mechanism and Machine Theory.
Study on the design theory of self-adaptive fault tolerant parallel robots based on redundant structures (Participant, Ranked 2nd, 2016/01 to 2018/12)
National Natural Science Foundation of China (NSFC) Project
Selected publications:
- Tian, C. , Li, L. , Xia, Z. , & Zhang, D. . (2023). A Novel Class of (3+2)-DOF Reconfigurable Generalized Parallel Mechanisms with Kinematic Redundancy. IFToMM World Congress on Mechanism and Machine Science. Springer.
- Tang, H. , Zhang, D. , & Tian, C. . (2022). An approach for modeling and performance analysis of three-leg landing gear mechanisms based on the virtual equivalent parallel mechanism. Mechanism and Machine Theory.
- Tang, H. , Zhang, D. , & Tian, C. . (2022). A method for comprehensive performance optimization of four-leg landing gear based on the virtual equivalent parallel mechanism. Mechanism and Machine Theory.
- Tian, C. , Xia, Z. , Li, L. , & Zhang, D. . (2024). The novel synthesis of reconfigurable generalized parallel manipulators with kinematic redundancy. Mechanism and Machine Theory.
Research on Configuration Design Theory and Performance Evaluation Methods of Generalized Parallel Mechanisms (Participant, Ranked 3rd, 2017/01 to 2020/12)
National Natural Science Foundation of China (NSFC) Project
Selected publications:
- Tian, C. , Fang, Y. , & Ge, Q. J. . (2018). Structural synthesis of a class of two-loop generalized parallel mechanisms. Mechanism and Machine Theory.
- Tian, C. , Fang, Y. , & Ge, Q. J. . (2022). Design and analysis of a partially decoupled generalized parallel mechanism for 3t1r motion. Mechanism and Machine Theory.
- Tian, C. . (2019). Structural Synthesis and Performance Study of Generalized Parallel Mechanisms. Thesis of Doctoral Degree.
- Tian, C. , Fang, Y. , & Ge, Q. J. . (2018). New Kinematic Structures for Two-Loop Generalized Parallel Mechanism Designs. 2018 IEEE International Conference on Robotics and Automation (ICRA). IEEE.
Data Driven Kinematics for Mechanical Design Innovation (Participant, 2016/11 to 2019/05)
National Natural Science Foundation of China (NSFC) Project
Selected publications:
- Data Driven Kinematics for Mechanical Design Innovation.
- [Link]
- Tian, C. , Fang, Y. , & Ge, Q. J. . (2018). Structural synthesis of a class of two-loop generalized parallel mechanisms. Mechanism and Machine Theory.
- Tian, C. . (2019). Structural Synthesis and Performance Study of Generalized Parallel Mechanisms. Thesis of Doctoral Degree.
Research on design theory and critical technology of multifunctional reconfigurable robot for rehabilitation (Participant, 2013/01 to 2015/12)
National Natural Science Foundation of China (NSFC) Project
Selected publications:
- Tian, C. , Fang, Y. , & Ge, Q. J. . (2018). Structural synthesis of a class of two-loop generalized parallel mechanisms. Mechanism and Machine Theory.
- Tian, C. . (2019). Structural Synthesis and Performance Study of Generalized Parallel Mechanisms. Thesis of Doctoral Degree.
- Tian, C. , Fang, Y. , & Ge, Q. J. . (2018). Structural synthesis of a class of two-loop generalized parallel mechanisms. Mechanism and Machine Theory.
- Tian, C. . (2019). Structural Synthesis and Performance Study of Generalized Parallel Mechanisms. Thesis of Doctoral Degree.